




| 品牌 | 其他品牌 | 产地类别 | 进口 |
|---|---|---|---|
| 应用领域 | 食品/农产品,电子/电池,包装/造纸/印刷,汽车及零部件 |
基于深度学习和3D相机的无序抓取解决方案
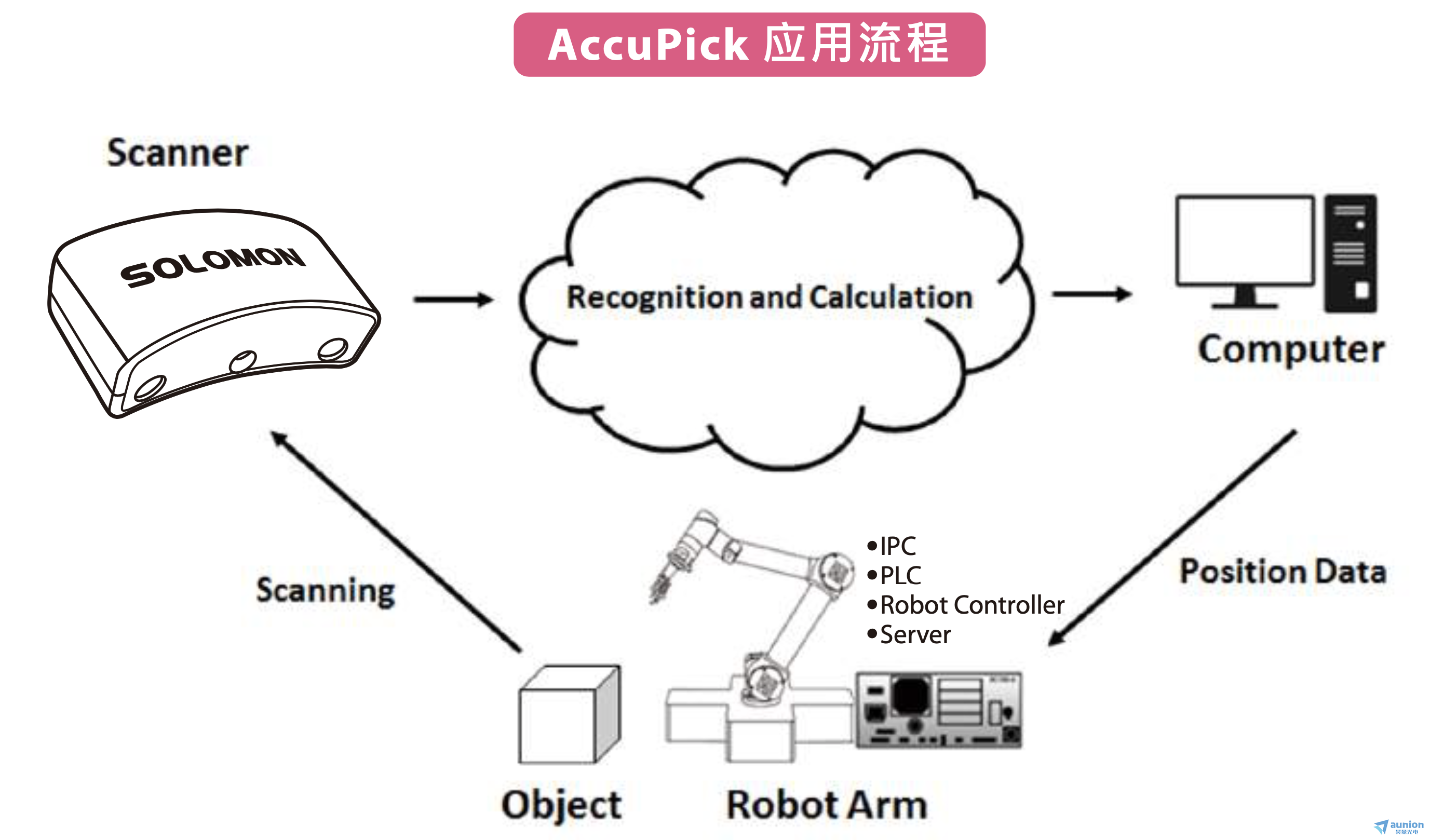
无序抓取Random Bin Picking,在机器视觉领域被认为具有挑战性,难度在于,如何让机械手臂从随机堆放的工件/物料中,准确无误的拿取所需工件/物料,并摆放至正确目的位置。基于深度学习和3D相机的解决方案AccuPick 3D,通过深度学习和3D相机快速辨识不同工件/物料在三维空间摆放的位置与姿态,并精准引导六轴协作机械手臂进行取放,由于工件/物料不需要事先整理及排列即可被辨识,因此能有效提升许多工厂的生产效率。AccuPick 3D作为一站式的Random Bin Picking解决方案,显然更有利于不同行业应用的的导入与使用。
AccuPick 3D是一套基于深度学习和3D相机的机器人智能无序抓取解决方案,AccuPick 3D无缝集成了3D相机、进行2D图像识别的深度学习算法、碰撞检测、机器人路径规划和机器人手臂运动控制为一体,可满足客户*的无序抓取需求。
AccuPick 3D优势
1.基于深度学习算法的2D图像识别,缩短辨识训练时间;柔性制造换线快,免CAD适用行业应用更广
「训练」机器如何辨识物料在三维空间中的各种摆放状态通常需花费大量时间进行调试。但是无论物件的复杂度或种类,AccuPick 3D无序抓取系统都能通过深度学习算法让机器快速识别物件,节省工程师「训练」机器建模时间70%以上,即使工件无CAD文件也不是问题。
2. 减少3D中复杂的物品识别训练时间
在随机动作中训练机器来识别复杂的或非常规形状的物品经常会占据很多时间。通过AccuPick 3D无序抓取系统,这项工作随着深度学习算法会被简化– 所有的需求会被同时输入多张工件的图片成像,并且来让深度学习来辨识。
3. 没有三维设计图?这不是问题
传统的无序抓取系统要求使用者输入三维设计图。然而,很多工件没有三维设计图,或者用户不想公开它的设计图。AccuPick 3D就是一个完美的解决方案了,因为它根本不需要设计图– 它只需要给软件上传物品的图像供其训练和学习。
4. 支持16个主要机器人品牌
AccuPick 3D已与16个主要机器人品牌完成整合,可支持的品牌名单仍在持续扩增中。同时,AccuPick 3D能与罗克韦尔自动化(Rockwell Automation)、西门子(Siemens)、三菱(Mitsubishi)、欧姆龙(Omron)等主要PLC品牌通讯联接。AccuPick 3D所提供的开放式平台,使客户对机器人品牌拥有更多的弹性选择,以满足其需求。
5. 能快速规划机器人路径以防止碰撞
在无序抓取解决方案中,除了要能识别工件及其位置,更大的挑战是,机器人如何精准拣选工件而不碰撞到料箱和其他障碍物。AccuPick 3D所搭载的机器人路径规划模块(选配),能够快速决定机器人完成每个工件抓取所需的路径。此机器人路径规划系统适用于AccuPick 3D所支持的16个机器人品牌。
6. 快速图像扫描和处理
AccuPick 3D机器人智能无序抓取系统用由2个230万像素的相机组成的3D相机来扫描,每个图像0.2秒。每一个扫描的图像由大约200万个点组成,并且无论被扫描的影像多么复杂,不需一秒钟即可处理。快速影像扫描和处理使AccuPick 3D机器人智能无序抓取系统成为提升工厂和仓储生产力中*的部分。
AccuPick 3D主要应用
汽车行业
汽车零部件的无序抓取和分拣,基于AccuPick 3D. 这个系统使Kawasaki 5公斤的机械臂,能够准确识别出工件的正反面。
汽车引擎盖机器人涂胶
汽车引擎盖涂胶用到AccuPick 3D解决方案中的3D相机和路径规划模块。3D相机自动识别引擎盖的位置,并且依次调整机械臂的运动路径,无需机械的固定工件的位置。这个应用场景利用优傲机械臂UR10的360度柔性特点,在复杂的汽车引擎盖轮廓进行作业。
食品与饮料行业
高速变形字符识别
印在瓶盖上的高度变形字符需要以每秒10个瓶子的速率被识别,通过深度学习算法和少量的样本训练,字符马上就可以被软件识别。
机械与金属行业
借助基于深度学习算法的2D图像识别功能和3D相机,机械臂被训练来抓取复杂形状的工件。不需要CAD图来匹配物体的3D位置,相较于传统的模板匹配方法,训练时间明显缩短。
铸造机的无序分拣
通过使用AccuPick 3D解决方案,优傲机械臂UR10被训练来随机抓取放在物料箱中的圆形金属片,在控制系统的同步下插入铸造机中。
随机捡取黑色螺丝
使用优傲机械臂UR5在料箱中随机抓取M4黑色螺丝。
包装与物流行业
拆码垛
基于标签信息抓取随意摆放的箱子。
仓储
装在自走车上的物料箱将物料运载到工作站,AcciPick 3D通过深度学习算法和3D相机,能够分辨有细微颜色差别的小包装盒子,并分拣至不同的料箱。
 上海市徐汇区虹梅路2007号6号楼3楼
上海市徐汇区虹梅路2007号6号楼3楼 info@auniontech.com
info@auniontech.com
